
CollaboRobot — Nonverbal Human–Robot Negotiation
A human and a robot arm decide what to cook together — no speech, no script, just ingredients moving between zones.
CollaboRobot is a nonverbal negotiation between a person and a robot arm: neither knows the final recipe at the start, and both shape it by moving ingredient cubes between zones, with the robot signaling intent through legible motion instead of words. I owned the motion and system architecture.
Overview
A project from a Human-Robot Interaction Masterpraktikum at LMU Munich (Prof. Butz), built with a 3-person team. CollaboRobot is a nonverbal, open-ended negotiation between a person and a Kinova Gen3 arm: neither knows the final recipe at the start, and both shape it by moving ingredient cubes between a Storage, a Proposal, and an Accepted zone.
How It Works
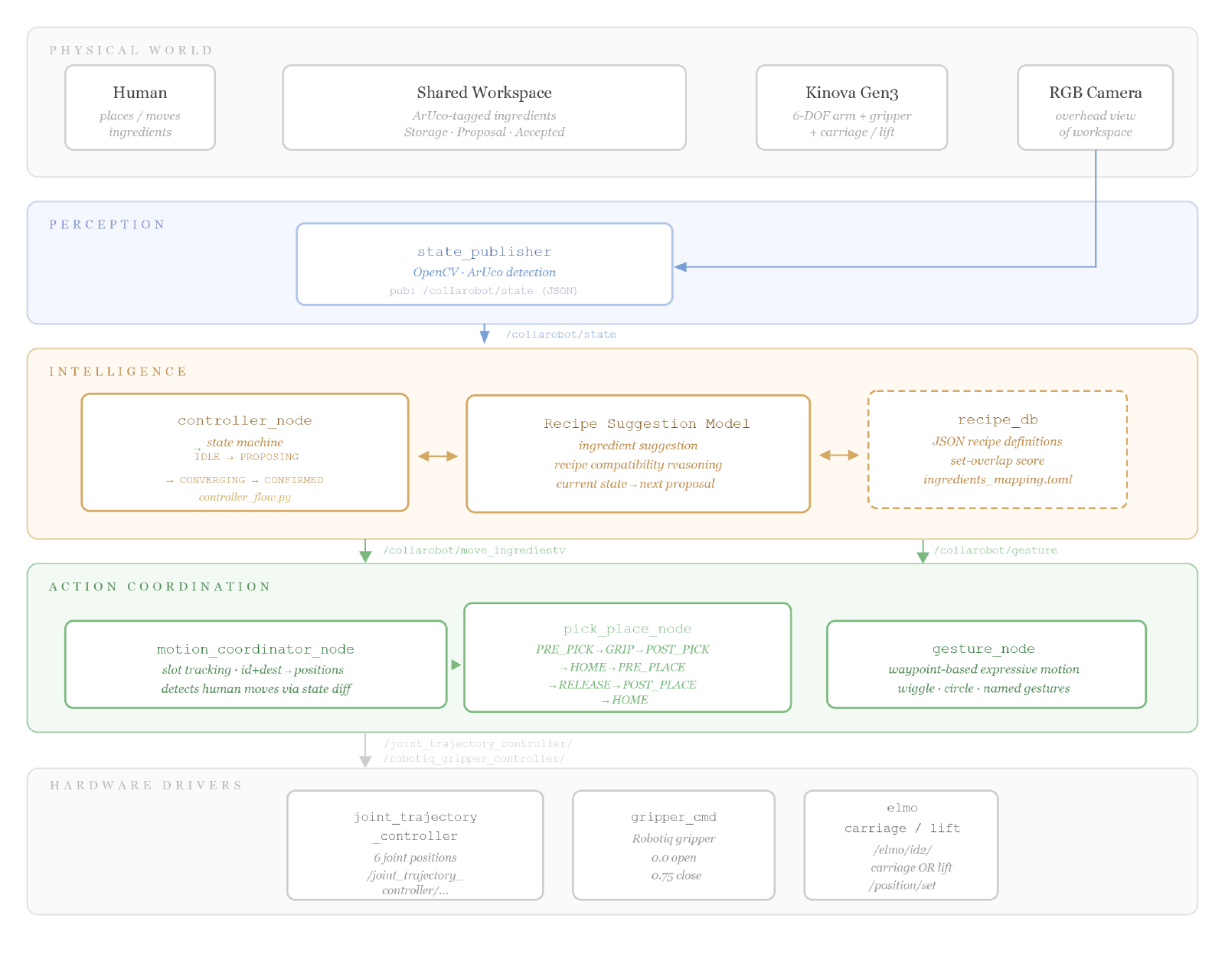
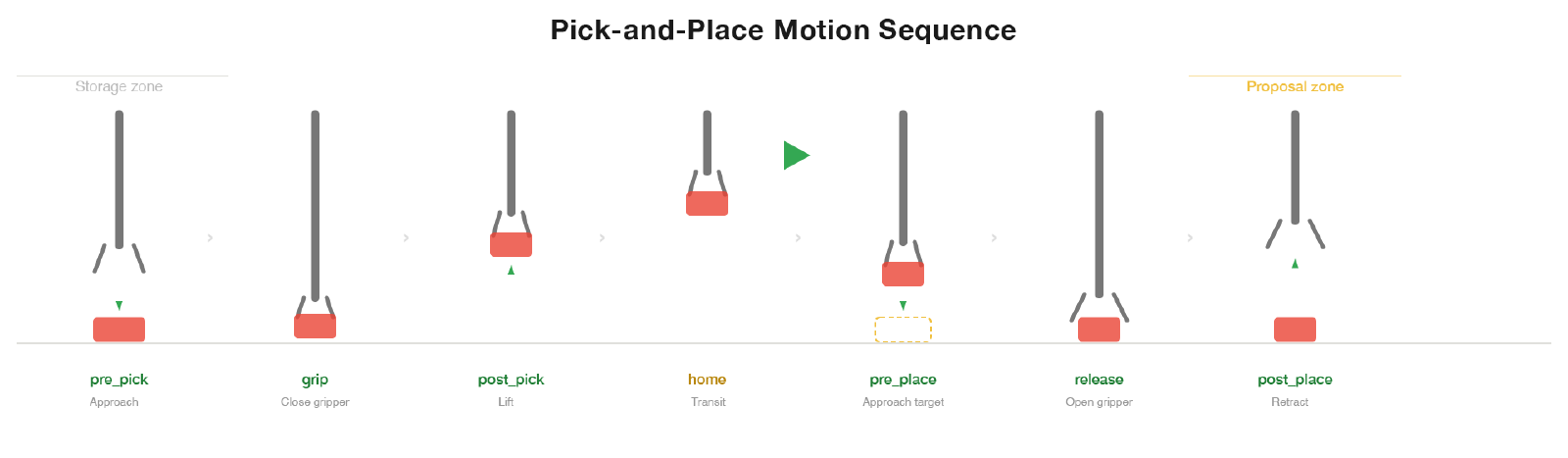
The robot perceives the table with a camera, proposes and rejects ingredients, and signals intent through legible motion and gestures instead of words. The human places an ingredient in the Proposal zone; the robot reads the table state and responds — moving it to Accepted, rejecting it back to Storage, proposing something of its own, or skipping its turn. A statistical model over a recipe corpus drives these decisions until a coherent recipe emerges.
My Role
I owned the motion and system architecture — the ROS2 stack, action servers, and hardware coordination that turn decisions into safe, legible movement on real hardware.